Subespaços vetoriais
Deseja-se dentro de um espaço vetorial V, detectar se um subconjunto S de V é também espaço vetorial. Tais conjuntos serão chamados subespaços de V.
Exemplo:
V = ![]() ² com as operações usuais de adição e multiplicação por escalar é um espaço vetorial.
² com as operações usuais de adição e multiplicação por escalar é um espaço vetorial.
S é um conjunto de vetores que pertencem a uma reta que passa pela origem. Neste caso, S é um subconjunto de V.
S ⊂ V = ![]()
S = {(x,y) : x = 3y} = ![]()
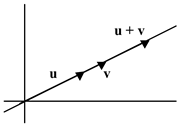
u = (3,1), v = (9, 3),
u + v = (12, 4)
Definição:
Seja V um espaço vetorial e S um subconjunto não vazio de V.
S é um subespaço vetorial de V se:
Propriedades
Qualquer subespaço S de V deve conter o vetor nulo 0 (devido ao Axioma A3 do Espaço Vetorial). Caso contrário S não é um subespaço vetorial.
Todo espaço vetorial
admite pelo menos 2 subespaços (chamados subespaços triviais), o conjunto {0} (subconjunto formado somente pelo elemento zero) e o próprio espaço vetorial V.
Exemplos de subespaços vetoriais
(a) Seja V = ![]() com as operações usuais o espaço vetorial S =
com as operações usuais o espaço vetorial S = ![]() .
.
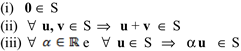
S pode ser representada por um conjunto de vetores pertencentes a uma reta que passa pelos pontos (-1,0) e (0,1).
O vetor nulo ( 0,0 ) ![]() S
S ![]() S não é um subespaço vetorial de V.
S não é um subespaço vetorial de V.
(b) Seja V = ![]() com as operações usuais o espaço vetorial e
com as operações usuais o espaço vetorial e ![]() .
.
S não é vazio, pois ![]() .
.
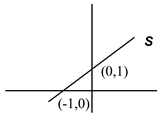
Mas, existem 2 vetores u e v de S tais que (u + v) ![]() S.
S.
Por exemplo, u = (1,1), v = (-1,1) pertencem a S e u + v = (0,2) ![]() S.
S.
Portanto, S não é um subespaço de V = ![]() .
.
(c) Seja V = ![]() com as operações usuais o espaço vetorial e S =
com as operações usuais o espaço vetorial e S = ![]() .
.
Obs: S é um conjunto de vetores pertencentes a um plano que passa pela origem.
S é um subespaço de V ?
Solução:
Vamos verificar se em S satisfazem as condições (I), (II) e (III).
(I) (0,0,0) ![]() S, pois a0 + b0 + c0 = 0.
S, pois a0 + b0 + c0 = 0.
(II) Sejam u = (u1, u2, u3), v = (v1, v2, v3) elementos de S.
Então, ![]() u+v = (u1+v1 , u2+v2 , u3+v3).
u+v = (u1+v1 , u2+v2 , u3+v3).
Logo, a(u1+v1) + b(u2+v2) + c(u3+v3) = (au1+bu2+cu3) + (av1+bv2+cv3) = 0+0 = 0. Portanto, (u1 + v1, u2 + v2, u3 + v3) ![]() S.
S.
Daí, u + v ![]() S.
S.
(III) Seja ![]()
![]() e u = (u1, u2, u3)
e u = (u1, u2, u3) ![]() .
.
Se u ![]() S, então au1 + bu2 + cu3 = 0 e
S, então au1 + bu2 + cu3 = 0 e ![]() u = (
u = (![]() u1 +
u1 + ![]() u2 +
u2 + ![]() u3).
u3).
Portanto, a![]() u1 + b
u1 + b![]() u2 + c
u2 + c![]() u3 =
u3 = ![]() ( au1 + bu2 + cu3) =
( au1 + bu2 + cu3) = ![]() 0 = 0. Dai
0 = 0. Dai ![]() u
u ![]() S.
S.
Como as 3 condições foram satisfeitas, S é um subespaço de V = ![]() .
.
Intersecção e Soma de Subespaços
Teorema:
Sejam S1 e S2 subespaços vetorias de V (espaço vetorial).
Então,
(i) S1 ∩ S2 é um subespaço de V.
(ii) S1 + S2 é um subespaço de V.
OBS:
S1 ∩ S2 = {v ![]() V: v
V: v ![]() S1 e v
S1 e v ![]() S2}
S2}
S1 + S2 = { v = u + w / u ![]() S1 e w
S1 e w![]() S2}.
S2}.
Todo elemento de S1 + S2 é um vetor soma de 2 vetores, um vetor de S1 e o outro de S2.
Exemplos:
a) seja V = M(3 x 3) o espaço vetorial das matrizes de ordem 3 e
S1 = 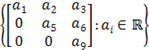 e S2 =
e S2 = 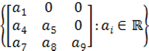
S1 e S2 são subespaços de V = M(3 x 3)
S1 = {matrizes triangulares superiores}
S2 = {matrizes triangulares inferiores}
Logo, S1 ∩ S2 =  é um subespaço de V = M(3 x 3)
é um subespaço de V = M(3 x 3)
b) Seja V = ![]() o espaço vetorial,
o espaço vetorial,
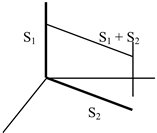
S1 = {(0, 0, x): x ![]() } é um conjunto de vetores pertencentes
a reta no eixo z e S2 = {(a, a, 0): a
} é um conjunto de vetores pertencentes
a reta no eixo z e S2 = {(a, a, 0): a ![]() } é um conjunto de
vetores pertencentes a uma reta no plano xy.
} é um conjunto de
vetores pertencentes a uma reta no plano xy.
S1 + S2 = {(a,a,x)} é o conjunto de vetores pertencentes ao plano que contém as retas na qual os vetores de S1 e S2 pertencem.
S1 + S2 é um subespaço de V = ![]() .
.
Soma Direta de Subespaços
Definição:
Sejam S1 e S2 subespaços vetoriais de V. Então V é a soma direta de S1 e S2 (Representado por V = S1 ![]() S2 ), se V = S1 + S2 e S1 ∩ S2 = { 0 }.
S2 ), se V = S1 + S2 e S1 ∩ S2 = { 0 }.
Seja o espaço vetorial das matrizes de ordem 2 V = M(2 x 2). Sejam os subespaços vetorais S1= ![]() e S2=
e S2= ![]() onde a, b, c, d
onde a, b, c, d ![]() . Então, S1 + S2 =
. Então, S1 + S2 = ![]() = M(2 x 2) e S1∩ S2 =
= M(2 x 2) e S1∩ S2 = ![]() .
.
Logo, V = S1 ![]() S2 e portanto V é soma direta de S1 e S2.
S2 e portanto V é soma direta de S1 e S2.